ブログ
【スマートシティ連載企画】第17回 スマート農業と法規制・法的リスク(3) 自動走行農機・ロボット農機
2023.06.12
SHARE![]()
![]()
![]()
自動走行農機・ロボット農機の現在地
(1) 自動走行農機・ロボット農機の実用化
日本の農業における課題(高齢化・担い手不足)を解決する手段の一つとして、近年では自動運転システムを搭載した農業機械への注目が高まっています。自動走行農機やロボット農機とも呼ばれます。(以下、「ロボット農機」と総称します)
すでに多くのロボット農機の製品が市場に投入されているほか、「自動」運転に限らず、人間による操作・運転を前提にした運転支援(直線走行維持など)や、リモコンによる遠隔操作などの機能のついた農機も含めると、実用化され市販されている製品はさらに多数に上ります。
このような自動走行機能やその支援の機能がついた農機のジャンルも多岐に及んでおり、トラクター、田植機、草刈り機、コンバインといった主要な農機であれば、容易に自動走行機能つきの製品を探すことが可能です。
農林水産省公式ウェブサイトにおいては、「農業新技術製品・サービス集」というページが設けられており、農水省が把握しているロボット農機(例:画像1 ロボットトラクター)などの先進的な製品を概観することができます。
画像1(出典:「農業新技術製品・サービス集」【分割版】2. ロボットトラクター https://www.maff.go.jp/j/kanbo/smart/products.html)
(2) 自動走行の正確性を支える衛星システム
自動車の自動運転と同様に、農機の自動走行にもGPSやGNSS等の衛星システムによる位置情報が欠かせません。これらの衛星から得られた正確な位置情報を利用することによって、ロボット農機の作業精度、ひいては安全性が大きく向上しています。
GPS(Global Positioning System、一般に「全地球測位システム」と訳されます)は、地球を回る24個の人工衛星から発信された電波を利用して現在地を測定することを可能とするシステムで、1980年代にアメリカが開発し、実用化されました。
GNSS(Global Navigation Satellite System)とは、GPSを含む人工衛星による測位システムの総称です。GPSでは24個中4個の人工衛星から電波を受信可能なことが正確な測位の前提とされていますが、日本では、場所によっては建物等の陰に入ってしまい、GPS衛星の一部から電波を受信できない状況が起こりえます(画像2)。また、ビルからの電波の反射や、電離層を電波が通過することによって生じるズレを補正するためには、多数の人工衛星からの電波が取得できることが望ましいとされています。

画像2(出典:「準天頂衛星システムの開発」(国立研究開発法人海上・港湾・航空技術研究所)https://www.enri.go.jp/~sakai/qzss.htm )
上記のような人工衛星による位置情報の高精度化の必要性から、日本では、「みちびき」という準天頂衛星システム(QZSS)が導入されています。
「みちびき」は、日本列島とオーストラリア大陸とを8の字を描きながら南北に往復するように地上から見える軌道(準天頂軌道 quasi-zenith orbit)(画像3)で地球を周回する人工衛星が主体となって構成されるシステムで、2010年に第1号機が打ち上げられ、2018年11月からは4機体制で運用されています。これによって、日本国内では、「みちびき」衛星が最低1機、建物の陰になりにくいほぼ「真上」(仰角70度以上)に位置している状況が確保されるようになっています(画像4)。
「みちびき」は、2023年度から2024年度にかけて人工衛星を順次追加で3機を打ち上げて、7機体制の構築が予定されています。7機体制が実現した場合、日本国内では他国の衛星からの位置情報を必要とせず、「みちびき」だけで十分な位置情報データが得られることになるとされています。

画像3(出典:「みちびきの必要性」内閣府 宇宙開発戦略推進事務局 https://qzss.go.jp/overview/services/sv02_why.html )
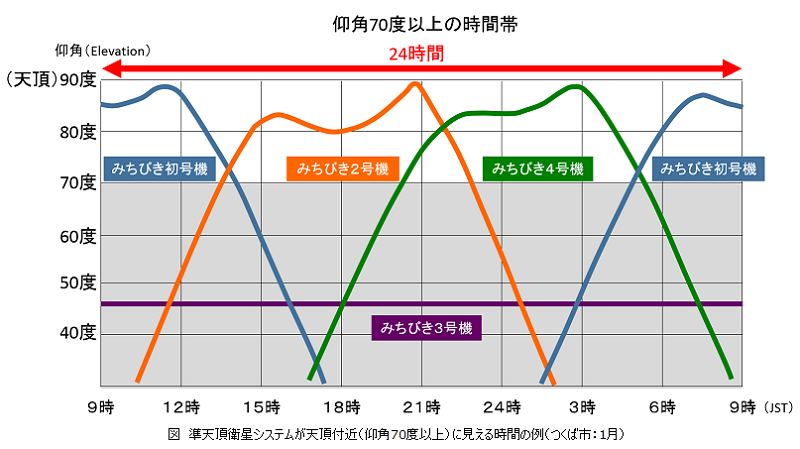
画像4(出典:2018年1月12日報道発表資料「電子基準点で「みちびき3号機、4号機」の観測を開始 ~みちびきを24時間使用できます~」国土地理院https://www.gsi.go.jp/denshi/denshi45015.html )
内閣府サイトに「みちびき」対応機器の一覧が掲載されていますが、これらの「みちびき対応受信機」を搭載した「みちびき対応農機」も続々と市場に投入されてきています。
https://qzss.go.jp/usage/products/list.html#smartphone-tabletpc
(3) 位置情報の精度をさらに上げる技術
農機の自動走行に必要な情報は、人工衛星からの位置情報だけでは不十分な場合がまだ残ります。建物や電離層などによる電波の乱れが位置情報のズレをもたらし、そのために重大な誤作動につながる可能性があるためです。
このようなGPS/GNSSの誤差をさらに縮めるための技術の一つとして、「RTK」の活用が広まっています。
RTK(Real Time Kinematic)とは、GPS/GNSSによる測位を前提に、地上の電子基準点(携帯電話キャリア等の民間事業者が設置している電波発信構造物)からの電波を組み合わせるシステムです。これにより、誤差は1cm~数cm程度に縮小し、ロボット農機の実用に十分耐えるレベルになるとされています。
また、ほ場(圃場)の傾斜や段差によって農機の位置情報に狂いが出る場合があります。たとえば、トラクターが傾斜で右に傾いて屋根に搭載されたGPSユニットの位置が右に30cmずれた場合、位置情報としては「トラクター自体が右に30cm動いた」と認識されてしまう可能性があります。このような傾きによるずれをセンサーによって感知し、地形と農機との相対位置を補正する仕組みも開発されています。
ロボット農機の使用における法的リスク(民事・刑事・行政)
(1) 農機使用者の民事・刑事・行政上の責任
自動走行機能のない農業機械を走行・操作中に人身事故や物損事故を発生させた場合、それが農機使用者の過失(操作ミスや前方不注視等)によるものであれば、民事上の責任、つまり被害者に対して損害の賠償をすべき義務が発生することになります。
この「人為ミスによって他人に損害を与えたならば賠償すべし」という基本原則は、ロボット農機や運転支援機能付き農機による事故であっても、何ら変わることはありません。
自動走行機能や運転支援機能がついていても、その機械を使用するのは人間である以上、事故が起こった場合には、使用者に何らかのミスがあったかがまず問われることになります。
また、人身事故の場合には、農機の使用者に対して、自動車運転過失致死傷罪・業務上過失致傷罪などの刑事責任が追及される可能性があります。ロボット農機の場合であっても、事故を回避できなかった原因が自動走行機能の不具合ではなく使用者のミスにあったと認定された場合には、やはり刑事責任はその使用者に対して問われうることになります。
さらに、これらの事故が、ほ場の中ではなく公道(道路交通法上の「道路」)で発生した場合には、道路交通法の適用が及びます。つまり、いわゆる「道交法違反」として、免許取消や免許停止などの行政処分を受けることにもなる点も、自動走行か否かにかかわらず同様です。
なお、トラクター等の農機は、小型特殊自動車・大型特殊自動車として登録され(ナンバープレートが取り付けられ)、公道走行が可能なものもありますが(※注)、ロボット農機の自動走行機能は、公道上で使用することは想定されていません。当然ながら、ロボット農機を公道上で自動走行(無人運転や手放し運転)をさせた場合には、事故を起こさないとしてもそれ自体で道路交通法違反となります。
※注:従来は、登録済トラクターであっても、作業機を装着した状態では全長・全幅や灯火機等のために保安基準不適合となり公道走行が禁止されていましたが、現在では、作業機を装着した状態でも一定条件の下で公道走行が可能となるよう規制が緩和されています。
(農林水産省:作業機付きトラクターの公道走行について https://www.maff.go.jp/j/seisan/sien/sizai/s_kikaika/kodosoko.html )
(2) 農機メーカーの責任(PL法)
ロボット農機等の事故の原因が、農機使用者の過失ではなく、農機自体の欠陥にあったという場合(その欠陥が立証された場合)には、農機メーカーが製造物責任法に基づいて被害者に対して賠償責任を負うことになります。
ロボット農機のように先進的な技術を使用している製品の場合、製造物責任法上の「欠陥(通常有しているべき安全性)」とは何かという定義や境界線が不明瞭であることも、農機メーカーにとっては懸念すべきポイントとなります。
(3) 安全性の向上と期待値の上昇
ロボット農機は、事故を防止・回避するための機能が備わっている製品も多く、従来の人の手による運転と比較すれば、危険性は格段に減少しているといえます。しかしながら、事故の可能性をゼロにするものではありません。
むしろ、安全性への期待が高まっていることによって、事故発生時にはその期待が裏切られたことに対する心理的な受容度が低下し、責任追及が苛烈になる可能性もあると考えられます。
安全性確保ガイドラインの位置づけと必要性
(1) 安全性確保ガイドラインの概要
上記のようなロボット農機による事故の発生を未然に防ぐことを目的として、「農業機械の自動走行に関する安全性確保ガイドライン」(以下、「ガイドライン」)が農林水産省によって作成・公表されています。
農業機械の自動走行に関する安全性確保ガイドライン(2023年3月)
https://www.maff.go.jp/j/press/nousan/gizyutu/attach/pdf/230329-2.pdf
ガイドライン(2023年版)の対象となるロボット農機は、トラクター、茶園管理ロボット、田植機、草刈機、小型汎用台車、そしてコンバインの6種類です(画像5)。
また、ガイドラインの適用範囲は、①ロボット農機に無人(搭乗者なし)で自動走行させる方法で、②屋外の開放系(一般人の通行を遮断した「閉鎖系」ではない環境)での使用を対象とするものとされています。
当然ながら、無人(搭乗者なし)での自動走行を公道で行う場合は想定されていません。

画像5(出典:農業機械の自動走行に関する安全性確保ガイドラインについて(概要)2023年3月 農林水産省)
ガイドラインでは、対象ロボット農機6種に共通する事項と、各農機に固有の留意点とが定められています。
共通事項としては、以下の6項目に分けて説明されています。
①安全性確保の原則
②リスクアセスメントと保護方策等
③使用上の条件等
④安全性確保のための関係者の取組
⑤事故等発生時の対応
⑥国等の施策
いずれも、ロボット農機のメーカー、ユーザーのそれぞれの視点で遵守・留意すべき基本的事項が記載された内容となっています。
各農機に固有の留意点としては、対象ロボット農機ごとに、「危険源」と「危険状態」とが整理されています(別表1~6)。
事故が起こる場面としては、各対象ロボット農機に共通して以下の4類型が挙げられています。想定される被害者としては、第三者だけでなく、農機使用者自身および補助作業者も含まれます。
①ほ場内に立ち入った者への被害
②ほ場外への暴走による被害
③非定常作業時の被害
④用途外使用による被害
(トラクターおよび草刈機については、さらに「⑤用途外使用等による被害」の類型も想定されています)
別表1のトラクター(画像6)を例に挙げると、トラクターの危険源が「①ほ場内に立ち入った第三者への被害」として顕在化する例として「押しつぶされ、巻き込まれ」があり、その原因にはユーザーの「設定ミス」や「監視ミス」があり得るとされています。
そして、その「危険状態・危険事象の詳細」としては、設定ミスによってコース外を走行して接触したり、監視不足によって第三者の発見が遅れ、接触したりする場合が想定されています。
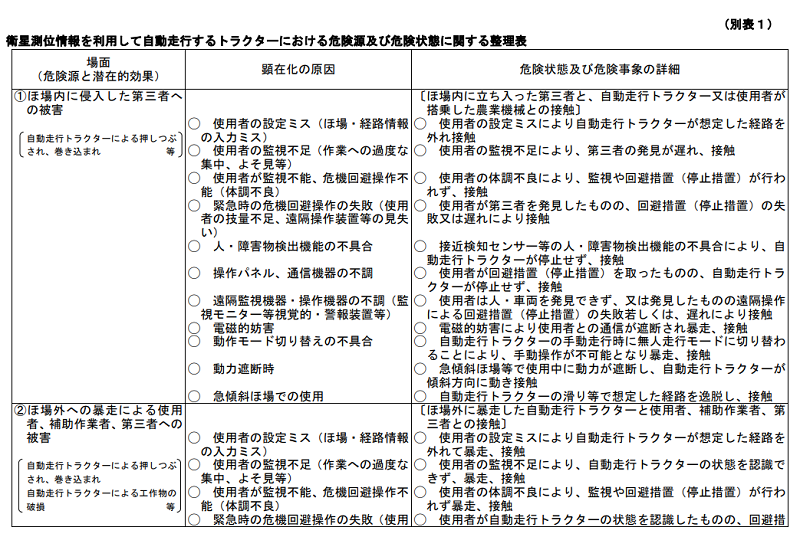
画像6(出典:農業機械の自動走行に関する安全性確保ガイドライン2023年3月 農林水産省p.17)
(2) ガイドラインの意義・必要性と限界
ガイドラインの適切な活用によって、ロボット農機のより安全な使用が可能になり、農業生産性の向上にも資することが期待されます。また同時に、ガイドラインは技術の普及促進や、技術の改善・発展にも寄与すると考えられます。
しかし、ガイドラインは、法的拘束力を有するものではありません。ガイドラインに従っていたことが証明されても法的責任を免除されることが保証されているわけではない一方、ガイドラインに従っていなかったとしても、法的責任が免除される場合はありうることになります。
また、ガイドラインの対象ロボット農機6種(トラクター、茶園管理ロボット、田植機、草刈機、小型汎用台車、コンバイン)は、あくまでも、実用化されてきている多種多様なロボット農機のうち、普及が進んだことで使用の実態と使用上の留意点とが整理されたものが、順次追加されてきているにすぎません。
このように、ガイドラインには性質上の限界があることを踏まえたうえで、文字通り「指針」として活用することが重要といえます。
(3) 安全性確保ガイドラインの対象に含まれていないロボット農機における留意点
ガイドラインの対象に含まれていないカテゴリーのロボット農機の場合、使用中に生じた事故について「ルール未整備なのでお咎めなし」となるわけでないことは当然です。むしろ、ルールが未整備である以上、どの程度まで安全確保措置を講じておけば足りるのかが不明確であるため、相対的により重い非難が向けられる可能性も否定できません。
農林水産省がまだガイドラインの対象に追加していない類型のロボット農機については、製造・販売者も、使用する農家も、ガイドラインの共通部分や類似点を参照しつつ、それぞれのロボット農機の性能・性質を踏まえて、自ら知恵を出し、安全な使用のために工夫をする必要があるといえます。
(4) まとめ
ロボット農機の登場によって、日本の農業のあり方も大きく変わりつつあります。大規模農場に限らず、小規模・零細な農家においてもロボット農機の恩恵を受け、より生産性の向上・作業負担の軽減が望める場面は今後も増えてくるでしょう、
その一方で、自動運転システムのような新規技術の分野においては、開発・販売時には想定していなかった法的リスクが顕在化する場面がいずれ生じてきます。
そのような事態に備えて、既存のガイドラインがあるならばそれを正確に読み込んだうえで実践し、ガイドラインが未整備の機器・分野であれば、法的な原理原則を踏まえたリスクの最小化を検討する意義があるといえるでしょう。
新たなロボット農機によって発生しうる法的リスクを最小化するということは、メーカー側・ユーザー側を問わず、自らの身を守るだけでなく、世の中全体の「うれしさ」を増大することにつながることになります。
以上
Member
PROFILE

SHARE![]()
![]()
![]()